官方微信視頻號


解決方案
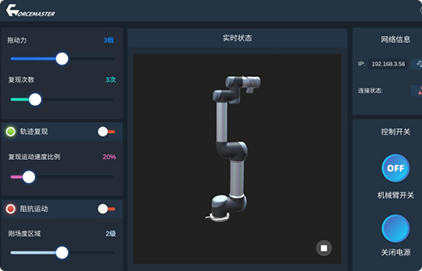
機器人力控模組解決方案
在傳統(tǒng)機器人人機協(xié)作領(lǐng)域,針對機械臂的運動控制,一般僅實現(xiàn)機械臂的示教功能,使得操作者能夠柔順控制機械臂,對機械臂的運動路徑不做要求,給使用者很大的自由度控制機械臂的柔順運動。在肢體康復(fù)、打磨等醫(yī)學(xué)和工業(yè)領(lǐng)域需要相應(yīng)的機械臂運動控制,特別是空間中機器人的運動路徑控制以及路徑上機械臂的阻抗控制。市場現(xiàn)有的大多數(shù)機械臂廠商一般采用電流環(huán)的方式對機械臂進行運動控制,沒有配置力覺感知相關(guān)傳感器,降低了機器人對外界作用力的感知靈敏度,控制精度較低,而配置力覺傳感器的生產(chǎn)廠商多將其運用于機械臂的拖動示教、恒力控制等簡單功能,沒有開發(fā)有關(guān)軌跡復(fù)現(xiàn)與阻抗控制相結(jié)合的功能,應(yīng)用領(lǐng)域受到一定限制。
解決方案
■ 功能特點
(1)適配多種末端執(zhí)行器
(2)人機工程抓握姿勢
(3)柔和均勻狀態(tài)光
(4)磨砂金屬與細膩按鈕
(5)緊湊布局最小化尺寸設(shè)計
(6)合理插口面板布局
(7)隱形散熱孔、美化設(shè)計
(8)可適配不同類型的工業(yè)及協(xié)作機器人,作為提升智能化的一個關(guān)鍵模塊


-

-

官方微信公眾號
電話:
021-62222910
地址:上海市普陀區(qū)曹楊路800號18號樓
版權(quán)所有©2001-2021 jiuyou.com九游(中國)機器人有限公司官網(wǎng) 滬ICP備18037447號-2 滬公網(wǎng)安備 31010702006397號網(wǎng)站地圖
